



松添教授は、農林水産省「スマート農業技術の開発・実証・実装プロジェクト」(令和4年度~6年度)において、松添教授が研究代表者となり、研究課題「栗園における労働軽減のための収穫・運搬ロボットの開発」を熊本高等専門学校、県内企業や生産団体等との共同で実施しています。
今回、栗の収穫部について、熊本高等専門学校・㈱末松電子製作所と共同で、特許を取得しました。
【内容】
特許番号:第7296072号
発明の名称:栗の収穫機
登録日:令和5年6月14日
特許権者:独立行政法人国立高等専門学校機構、公立大学法人熊本県立大学、株式会社末松電子製作所
【特徴】
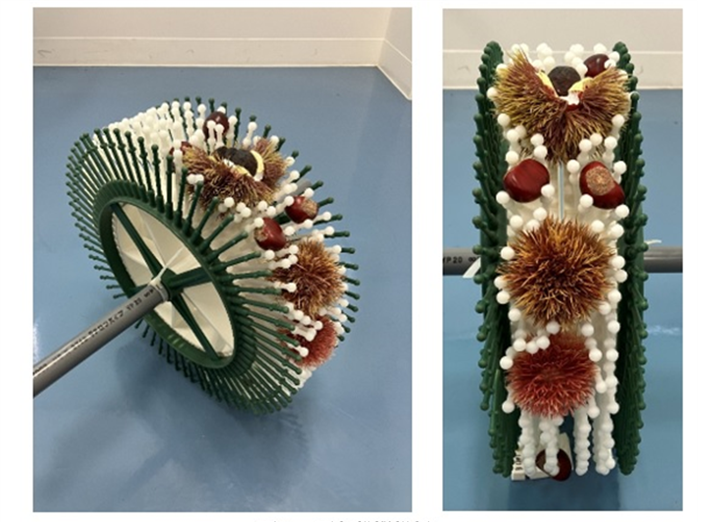
本発明は、栗の実用とイガ栗用として販売されている回転式収穫機を単純に横並びで組み合わせた構造ではなく、基本原理は同じであるが、ブラシ(円筒上に配置した突起)の間隔,栗の実用ブラシ(白の突起)の柔軟性,形状等を変えることで、イガ栗と栗の実を同時に挟み込んで収穫する手法である。図1のように栗の実用ブラシはイガ栗用に比べて柔らかくすることで、イガ栗が挟まるときには湾曲する機能を有する。補助器具としてカバーを付加することによって収穫率を上げることが可能となる。
栗園における労働軽減のための収穫・運搬ロボットの開発については、熊本県立大学のホームページを参照ください。
https://www.pu-kumamoto.ac.jp/news/post-18315/
特許取得について、松添教授は、「地面に落下したイガと栗を屈んで拾うという、栗特有の収穫作業で特許を取得できたので、今後販売戦略を積極的に進めていきます。また、自動運転についても研究・開発を行っていますので、特許が取得できる技術については今後も特許申請を行いたいです」と話されていました。
【研究の目標】
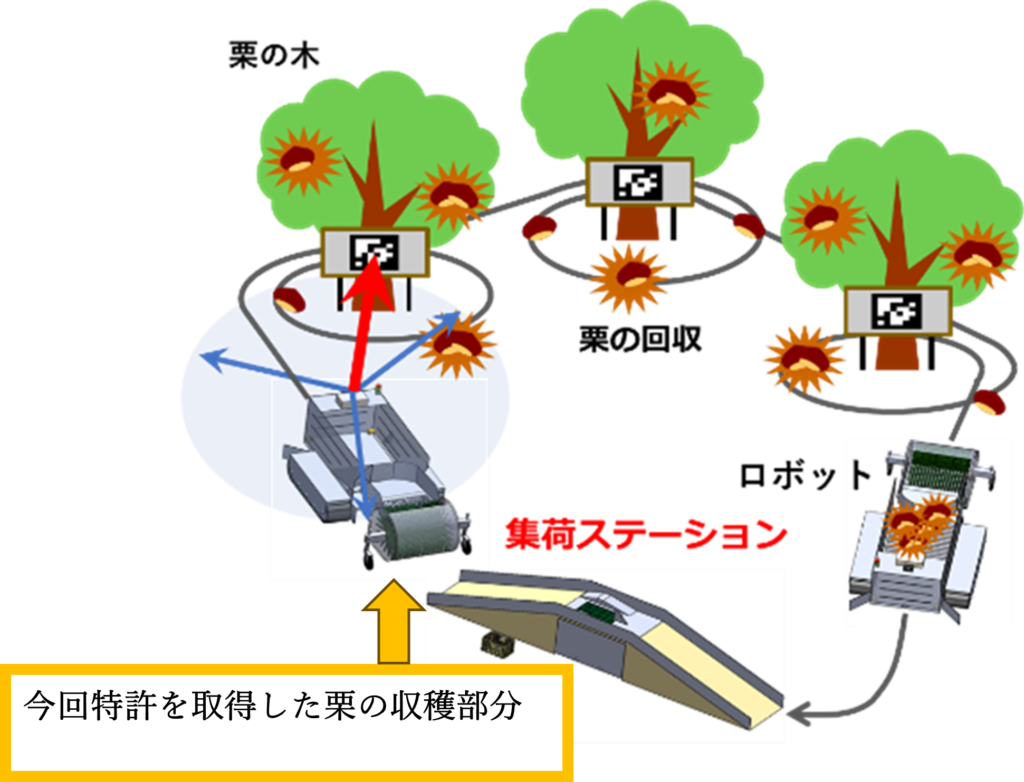
栗園における収穫・運搬の無人化・軽労化、労働時間の削減、並びに農業機械の電気化の推進を目的とした完全自律型の収穫・運搬ロボットの開発です。開発するロボットの特徴は(図2)、
〇収穫・運搬はGPS機能や人の関与が不要な自律型ロボットである
〇自動で動き回り、作業性が飛躍的に向上し、収穫時間が短縮できる
〇収穫した栗やイガは指定した場所に運搬できる
〇緩やかな傾斜地や凸凹の地面を安定的に走行できる(2㎞/h:ゆっくり歩く程度)
〇イガ付・イガ無し、大きさ・形に関係なく、すべての栗の品種に対応できる 等です。
【研究期間/予算】
〇令和4年度~6年度/約1億円程度(予定)
【研究組織】
〇研究代表者:松添直隆教授(環境共生学科環境資源学専攻植物資源学研究室)
〇研究分担機関:熊本高等専門学校、㈱末松電子製作所、(公財)地方経済総合研究所
〇協力機関(普及・実用化支援機関):山江村未来塾100人委員会やまえ栗ブランド部会、山江村役場、JAたまな
〇助言及び情報提供:熊本県農林水産部
【参考】
○スマート農業:ロボット・AI・IoT等の先端技術を活用して、省力化・精密化や高品質生産を実現する等を実現する新たな農業のことです(https://www.naro.go.jp/smart-nogyo/)
○松添(植物資源学)研究室ホームページ(https://shokubutsushigen.wixsite.com/prlab)
| お問い合わせ先 |
| 公立大学法人 熊本県立大学 環境共生学部 環境資源学専攻 松添研究室 〒862-8502 熊本市東区月出3丁目1番100号 TEL:096-321-6708(研究室) |
